MUBES
Multisensor-gestützte Bewegungssteuerung für die Navigation von schnellen Schiffen
Das Vorhaben MUBES widmete sich der Bearbeitung wissenschaftlicher Fragestellungen hinsichtlich des Einsatzes und der Kombination verschiedener Sensoren. Die Zielsetzung war definiert durch die komplexe Untersuchung der Eignung von Sensoren, deren Kombination, die Signalverarbeitung, die Informationsaufbereitung für die Verwendung im Navigationsprozess und die Informationsdarstellung für den Nutzer. Die durch die Werften vorgehaltene Effektivität des Transportmittels Schiff soll zukünftig auch im Einsatz der Fahrzeuge maximal ausgenutzt werden. Dazu war der Navigationsprozess qualitativ zu erneuern. Die dafür vorgesehenen Untersuchungen sollten gleichzeitig auch die Sicherung der gestiegenen Wertanlage der Fahrzeuge beachten.
Förderer / Projektträger:
- Bundesministerium für Bildung und Forschung (BMBF)
- Projektträger Jülich (PTJ)
Förderkennzeichen:
18S0167/0
Projektdetails:
Laufzeit: 01.02.1999 – 31.01.2002
1. Derzeitiger Stand von Wissenschaft und Technik
In der modernen Seeschifffahrt der derzeitige Automatisierungsgrad bei der Schiffsführung seit langem die automatische Kursregelung. Hinzu gekommen ist das selbständige Abfahren von manuellen Wegpunkten mittels Bahnführungssystemen. Eventuelle Abweichungen von der Sollbahnen werden mit Hilfe eines fest strukturierten Bahnreglers ausgeglichen. Von Vorteil ist hier die feste Reiseroute, die nur zu Beginn des Einsatzes eines Bahnführungssystem die ausführliche, etwas starre Prozedur der Wegpunkt-Bestimmung notwendig macht. Allerdings versagen diese Systeme gerade dann, wenn der Manöverraum eingeschränkt und ein monotones, kontinuierliches Fortschreiben der Schiffsbahn allein nicht zum Ziel führt.
2.Begründung/Zielsetzung der Untersuchung
Automatische Tracksysteme versagen immer dann, wenn der zur Verfügung stehende Manöverraum eingeschränkt und eine kontinuierliche, monotone Weiterführung der Schiffsbahn nicht mehr allein zum Ziel führt. Der Erfolg und die Effektivität des Manövrierens hängt dann im Wesentlichen von der subjektiven Einschätzung und Erfahrungen vom Schiffsführer ab, da diese komplexen Prozesse von ihm allein und selbständig zu bewältigen sind.
3. Methode
In dem Vorhaben MUBES wurden grundsätzlich neue automatisierungstechnische Ansätze untersucht. Zur Problemlösung wurden regelbasierte Tiefensuchalgorithmen analysiert und herangezogen. Zur Konvergenz des Suchprozesses wurden Selektionsregeln erarbeiten, welche die Umgebungssituation und das Bewegungsverhalten des betrachteten Schiffes berücksichtigen.
4. Ergebnis
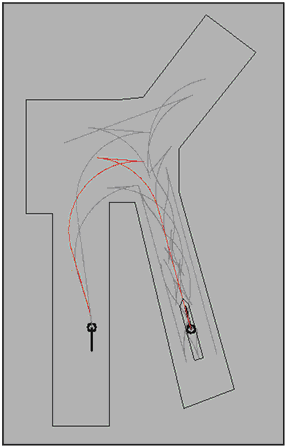
Als Ergebnis der ausgeführten Forschungsarbeiten ist im Kern eine Software entstanden, die auf der Grundlage von regelbasierten Suchalgorithmen eine Bahnplanung für das betrachtete Eigenschiff automatisch durchführt und die entsprechenden Steuerungen des Eigenschiffes zur Realisierung der Bahn generiert. D.h., ausgehend von einer definierten bzw. von Sensoren übertragenen Ausgangssituation und gewünschter Zielsituation wird eine Wegpunktliste mit den für die Schiffssteuerung notwendigen Parameter (Position, geforderter Kurs, geforderte Geschwindigkeit, u.s.w.) in Abhängigkeit der Umgebungsverhältnisse und dem Bewegungsverhalten des betrachteten Schiffes erzeugt. Mit Hilfe dieser Liste wird eine Steuerfolge zum konformen Abfahren der Wegpunkte erarbeitet, die direkt an die Schiffssteuergrößen gekoppelt werden kann.
Die Funktionalität der Software umfasst neben einer umfangreichen Dialogführung zur Aufgabenstellung, Initialisierung/Korrektur des Manöverraums, Visualisierung der Ergebnisse auch die Kopplung an ein reales Schiff ( bzw. Maritimen Simulationszentrum).
5. Schlussfolgerung/Anwendungsmöglichkeit
Zur Lösung der Problemstellung wurde bewusst ein völlig neuartiger Lösungsansatz gewählt. Er stellt keine Weiterentwicklung oder Verfeinerung bestehender Systeme dar.
Weiterführende Untersuchungen auf diesem Gebiet werden als sinnvoll und vielversprechend charakterisiert. Dazu kann die innerhalb des Projektes entwickelte Experimentierplattform genutzt werden, um vor dem Hintergrund des praktisches Einsatz solcher Systeme die bisherigen F&E- Ergebnisse fortzuschreiben und der technischen Entwicklung auf diesem Gebiet neue Impulse zu geben.
Damit ergeben sich Möglichkeiten die Qualität der nachgelagerten Prozesse erheblich zu steigern und somit einen messbaren Sicherheitsgewinn und Komfortzuwachs in Bereichen der Schiffsführung zu erreichen.