GALILEOnautic-Abschlusspräsentation am 28. Juni 2018 in Rostock
Fünf Projektpartner haben zwei Jahre lang gemeinsam an neuen Technologien zum autonomen Navigieren und optimierten Manövrieren von kooperativen Schiffen in Häfen gearbeitet und nun die Ergebnisse in Rostock auf dem Traditionsschiff und im Maritimen Simulationszentrum Warnemünde präsentiert.
Mit dieser abschließenden Demonstration wurden die Potenziale des entwickelten, autonomen Systems mittels kurzer Präsentationen und Live-Vorstellungen aufgezeigt. Anhand von drei Anwendungsszenarien mit verschiedenen vernetzten und kooperativen Demonstratoren wurden die Projektergebnisse vorgestellt.

Impressionen der Abschlusspräsentation






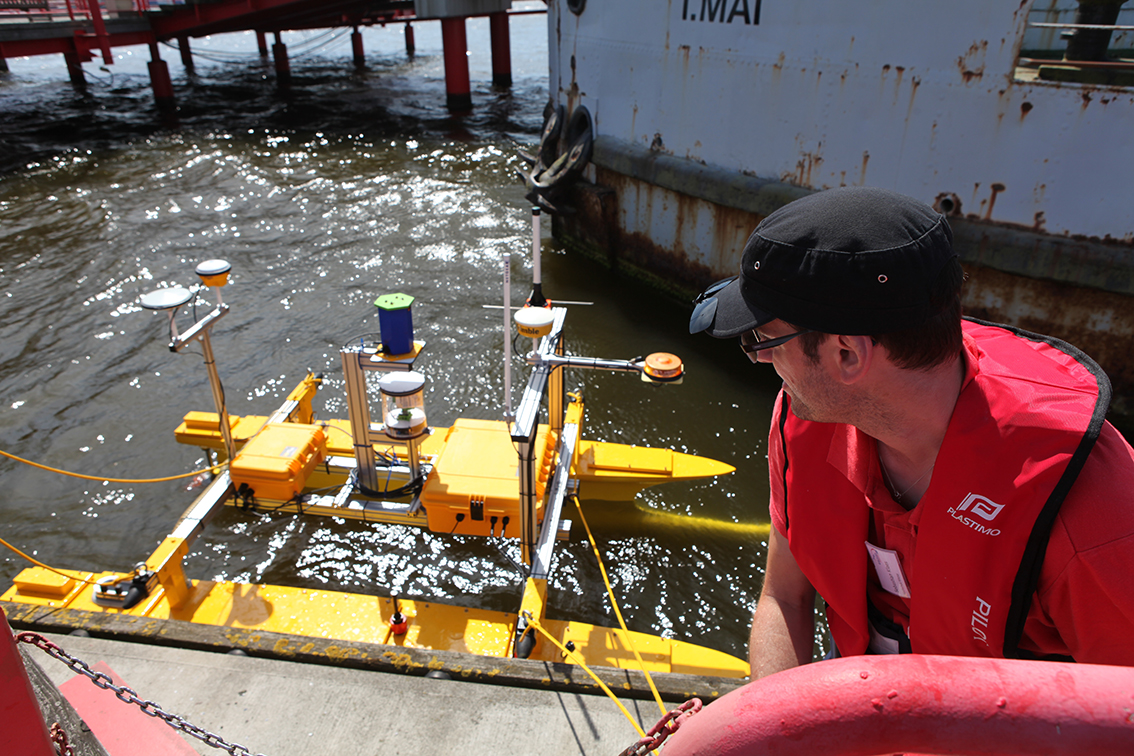



Als Versuchsfahrzeuge zur Erprobung der GALILEOnautic Entwicklungen im realen Umfeld kamen die unbemannten Oberflächenfahrzeuge (USV) MESSIN und SMIS der Universität Rostock zum Einsatz. Sie sind mit dem im Projekt entwickelten GALILEOnautic-System an Bord ausgestattet und repräsentieren zwei unterschiedliche Verkehrsteilnehmer. Während der MESSIN sich als hoch-manövrierfähiges Fahrzeug mit geringem Tiefgang darstellt, ist das SMIS-USV durch sein halbgetauchtes Design und die Antriebskonfiguration träge und tiefgangsbeschränkt. Wesentliche Eigenschaften sind:
In der Abschlussdemonstration mit den unbemannten Wasserfahrzeugen wurde ein Begegnungsszenario dargestellt, bei dem zwei Schiffe vernetzt sind und kooperativ agieren. Ein drittes, nicht-vernetztes Wasserfahrzeug dient als externe Störung. Es wurde durch ein manuell gesteuertes Schlauchboot repräsentiert und stellt einen herkömmlichen Verkehrsteilnehmer dar. Dieser übermittelt lediglich AIS-äquivalente Daten zur Eigenidentifikation; in diesem Fall die Positionsdaten sowie den Kurs und die Geschwindigkeit über Grund. Das Szenario ist vor allem für eine Übergangsphase vom heutigen Technikstand hin zu einem vollautomatisierten Gesamtsystem interessant. Bei der Berechnung der Ausweichrouten müssen daher auch die aktuell geltenden Kollisionsverhütungsregeln (COLREG) in der Schiffsführung berücksichtigt werden, um externe Teilnehmer sicher einbinden zu können.
Die in das Netzwerk eingebundenen Fahrzeuge MESSIN und SMIS tauschen mit dem Zentralrechner Soll- und Istgrößen gemäß der GALILEOnautic-Konzeption aus. Dazu gehören vor allem Sensorwerte und Zustandsgrößen sowie Vorgaben an die Fahrzeugregelung. Auf Basis dieser Daten bewertet der Zentralrechner permanent die Manöversituation aller Netzwerkteilnehmer während des Szenarios. Im Fall von Begegnungssituationen, die zu einer potentiellen Kollision führen würden, wird diese Gefahr durch den Zentralrechner erkannt und eine Warnung an das Netzwerk ausgegeben. Anschließend berechnet die zentrale Optimierung Ausweichtrajektorien, die von der Schiffsregelung umgesetzt werden, um die Begegnungssituation sicher aufzulösen.
Um die manuelle Schiffsführung in sicherheitskritischen Bereichen zu automatisieren, muss dieser Prozess, der vollständig auf den Erfahrungen des Operators beruht, zunächst analysiert werden. Ein Zwischenergebnis in der Automatisierung stellt die Assistenz des manuellen Prozesses dar, wobei der wachhabende Offizier auch bei widrigen Sichtverhältnissen mit allen notwendigen Informationen versorgt wird. Nahfelderkennungssysteme stützen mit genauen Abständen zu Hindernissen und Hafenanlagen wesentlich die GNSS-Daten sowohl für die Manöverassistenz als auch für höhere Automatisierungslevel und müssen entsprechend in der Sensordatenfusion berücksichtigt werden. Insgesamt kann dadurch eine verbesserte Beschreibung des Bewegungsverhaltens eines Schiffes gewonnen werden, das durch Wind, Strömung und Seegang beeinflusst wird. Im Szenario wurde das Nahfelderkennungssystem, eine Kombination aus Lidar- und Radar-Sensoren, auf dem hoch-manövrierfähigen USV MESSIN appliziert, um das Potential für die Anlegeassistenz zu demonstrieren.
Im Ship Handling Simulator (SHS) der Hochschule Wismar wurde gezeigt, wie vernetzte Kooperation von Schiffen in sicherheitskritischen Bereichen realisiert werden kann. Das Szenario fand in der Fahrrinne zum Hafen Rostock statt, einem begrenzten Fahrwasser, das einfahrende Schiffe mit bestimmtem Tiefgang nicht verlassen können, um nicht auf Grund zu laufen. In der Fahrrinne begegneten sich zwei Fähren mit jeweils einer Länge von 200 m, die nach den nationalen Kollisionsverhütungsregeln einander ausweichen müssen bzw. sich nicht behindern dürfen.
Beide Schiffe wurde jeweils über eine separate SHS-Brücke in die Gesamtsimulation integriert. Die Trajektorien dieser Schiffe werden unter den genannten Rahmenbedingungen automatisch auf einem Zentralrechner optimiert. Als zusätzliche in der Optimierung zu berücksichtigende Störung läuft ein weiteres Schiff ein, für das nur die AIS-Daten vom Simulator zur Verfügung gestellt werden. Die Grundlage für die optimierten Trajektorien sind synchronisierte Zustandsdaten aller Netzwerkteilnehmer, die vom Zentralrechner an die Schiffe übermittelt werden und als Vorsteuerung für die lokale Schiffsregelung an Bord dienen.
Die Steuerbefehle der Einzelschiffregelung werden über eine MOXA-Box direkt an die jeweilige SHS-Brücke übermittelt. Auf den a5l-Modulen erfolgt die Extraktion der NMEA-Daten, die von den Partnern benötigt werden. Außerdem wird die Gesamtheit der NMEA-Daten für die Prädiktion der Bewegung der Einzelschiffe verwendet.
Durch das SHS-Szenario wird der Funktionsnachweis erbracht, dass das modulare Konzept bestehend aus Kommunikation, Trajektorienoptimierung und Regelung auch bei Störungen eine sichere Kooperation von Schiffen gewährleistet. Die Simulationsumgebung bietet den geeigneten Rahmen für den risikolosen Test und weitere Optimierung aller Teilsysteme sowie ihres Zusammenwirkens.