MTCAS – Elektronische maritime Kollisionsverhütung
Teilprojekt: MTCAS HSW
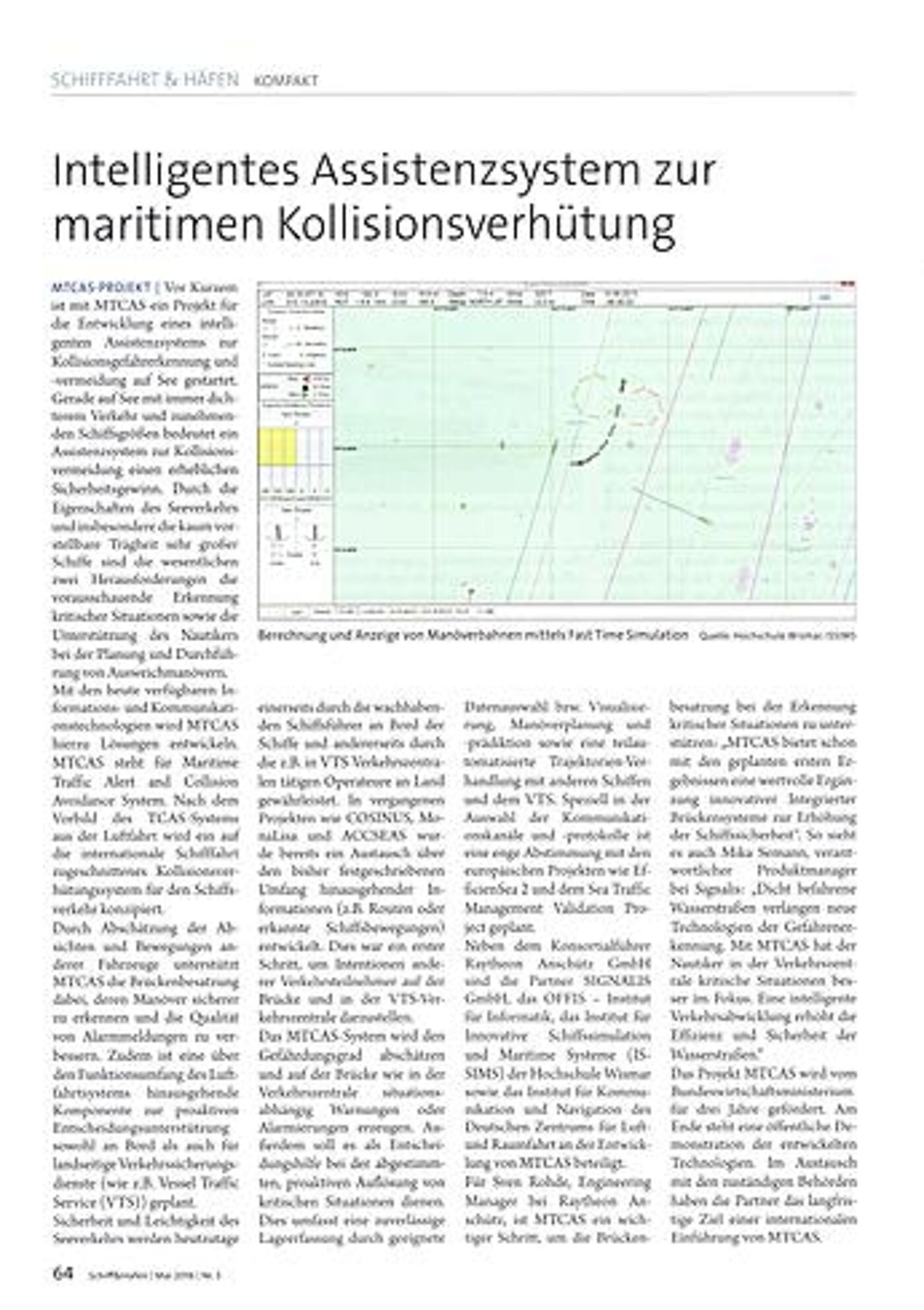
FTS-unterstützte dynamische Risikobewertung und Gefahrenerkennung
Projektleitung:
Prof. Dr.-Ing. Michael Baldauf
Bearbeiter:
Dipl.-Ing. Sandro Fischer
Dr.-Ing. Michael Gluch
Finanzierung:
BMWi, Projektträger Jülich
Bearbeitungszeit:
11/2015 - 10/2018
Projektpartner:
Airbus Defence and Space
Raytheon/Anschütz Kiel
OFFIS-Institut für Informatik, Carl-von-Ossietzky Universität Oldenburg
Institute of Communications and Navigation, Nautical System, Deutsche Zentrum für Luft- und Raumfahrt
Ziel des Teilvorhabens der Hochschule Wismar im Verbundprojekt MTCAS sind die wissenschaftlich Begleitung und Entwicklung, Implementierung und Test von Algorithmen und Verfahren zur Risikoeinschätzung und Gefahrenerkennung sowie für Alarme und Anzeigen eines neuartigen Unterstützungssystems zur Kollisionsverhütung.
Das Akronym MTCAS steht für "Maritime Traffic Alert and Collision Avoidance System" und vergegenständlicht das angestrebte Gesamtprojektziel, die Entwicklung eines technischen Kollisionsverhütungssystems für die Schifffahrt, ähnlich dem System in der Luftfahrt. Die Namensgebung soll den damit verbundenen Anspruch verdeutlichen.
TCAS/ACAS informiert den Piloten eines Flugzeugs über Ziele mit denen eine Kollisionsgefahr besteht, wenn diese definierte, zeitliche und räumliche Annäherungsgrenzen unterschreiten. Bei zunehmender Annäherung werden mit eskalierendem Kollisionsrisiko Alarme in drei verschiedenen Stufen generiert. Das Teilprojekt der Hochschule Wismar knüpft dazu an seine in den 1990er Jahren begonnenen Untersuchungen an und verfolgt die Entwicklung, die Umsetzung und den Test eines Konzeptes zur Übertragung des TCAS-Ansatzes aus der Luftfahrt auf den maritimen Bereich. Ziel ist die situationsabhängige Einschätzung von Kollisionsrisiken mit dynamisierten, selbstadaptierenden Alarmschwellwerten insbesondere unter Verwendung der FTS-Technologie.
Mit dem TCAS in der Luftfahrt werden dem Piloten nachvollziehbare, an die physikalischen Bedingungen angepasste, weitestgehend verbindliche Vorschläge unterbreitet. Bei Erreichen der höchsten Risikostufe, der sogenannten "Last Line of Defence" wird ein Alarm mit Handlungsanweisung zum Steigen bzw. Sinken generiert, denen der Pilot folgen soll. In der Schifffahrt gibt es andere Kollisionsverhütungssysteme, denen jedoch sowohl die prinzipielle Systematik als auch die in der Luftfahrt obwaltende Verbindlichkeit fehlt.
Ziel des MTCAS-Projektes (Maritimes TCAS) ist die Entwicklung eines ähnlichen Systems für die Schifffahrt, welches auf bestehende Regelungen aufbaut. Das MTCAS-System wird eine Entscheidungsunterstützungskomponente für die bord- und landgestützte Kollisionsverhütung im Schiffsverkehr enthalten und mit einer an das Erreichen der letzten Handlungsoption verknüpften "Last Line of Defence"-Funktionalität vor drohenden Kollisionen warnen.
Die grundlegende Idee der Umsetzung besteht in der Entwicklung von Verfahren zur Situationserkennung, Alarmgenerierung und Bestimmung von Handlungsoptionen zur vorausschauenden nachhaltigen Konfliktauflösung unterstützt durch dynamische Manöverprädiktionen mittels Fast-Time-Simulation-Technologie.
Im Teilprojekt der Hochschule werden insbesondere wissenschaftliche Untersuchungen zur dynamischen Bewertung des Kollisionsrisikos durchgeführt um Algorithmen für die Generierung von Kollisionswarnungen und Anzeigen zur Entscheidungsunterstützung für die Implementierung in ein MTCAS-Modul zur Verfügung zu stellen. Es ist ein Verfahren entwickeln, dass die dynamischen Aspekte der Risikoentwicklung berücksichtigt, indem nicht nur aktuelle Manövrierkennwerte sondern darüber hinaus aktuelle Statuszustände und externe Einflussgrößen in eine umfassendere Prozessmodellierung integriert und in Fast-Time Simulationen verarbeitet werden.
Please note: Once you watch the video, data will be transmitted to Youtube/Google. For more information, see Google Privacy.