KUKA-KRL-Toolbox for Matlab® and Scilab
(MatlabKukaKRL-Toolbox)
G. Maletzki, M. Christern, A. Schmidt, T. Pawletta, P. Dünow
Note
There exists a further toolbox development through the research group Computational Engineering and Automation at Wismar University, the Robotic Control and Visualization (RCV) toolbox for MATLAB.
The RCV toolbox consists of two consecutive parts:
Abstract
The KUKA-KRL-Toolbox is developed through the research group Computational Engineering and Automation at Wismar University. It realises the control of industrial robots with SCEs like Matlab and Scilab. The Toolbox is tested and validated through a prototype-development basing on a KR3 robot from KUKA.
Introduction
Due to the fact that research in robotics is proceeding, there are incessantly new fields of application for robots. As a result of that, the requirements concerning the robots are very great. Easy programming and integration of different external hardware (sensors, actors) are of particular importance. In this context it is desirable to offer a continuous homogeneous software environment from the early design to operation phase.
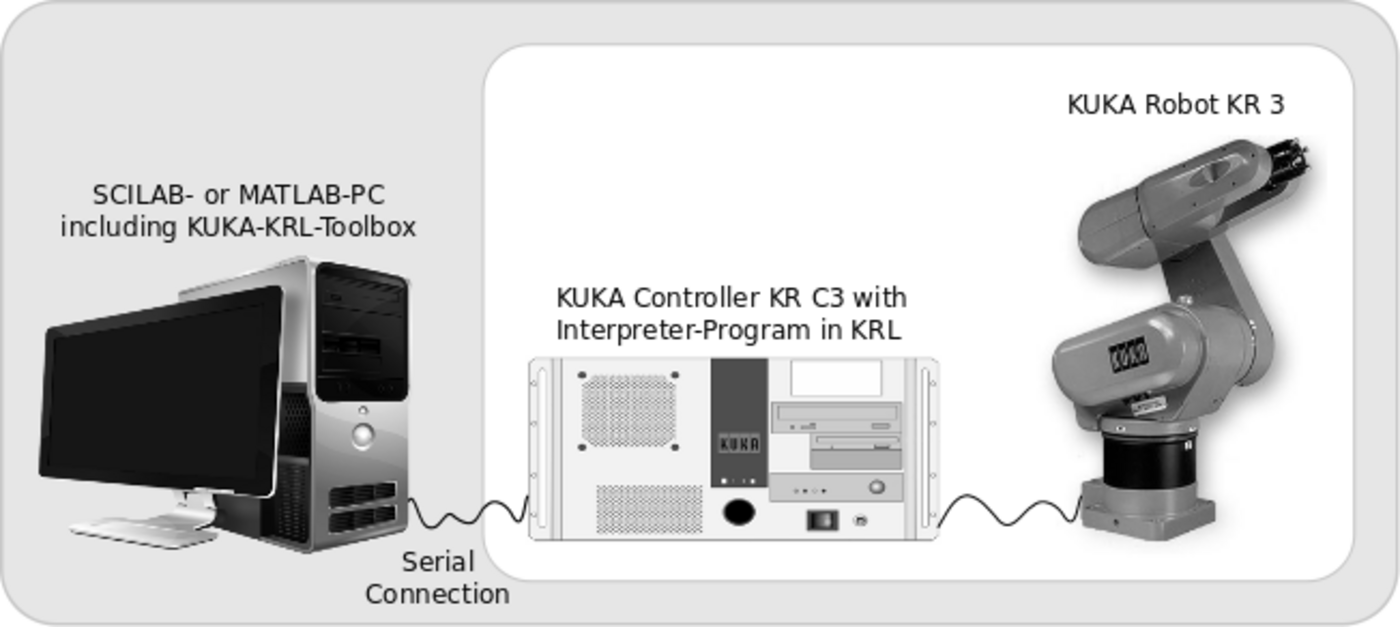
Control model design in the engineering and scientific domain are often characterized by the usage of Scientific and technical Computation Environments (SCEs) like Matlab, a famous commercial SCE. Other free SCEs already exist like Scilab or Octave. The KUKA-KRL-Toolbox closes the gap between the robot-manufacturer specific programming language, in this case KUKA Robot Language (KRL), and the SCEs. Figure 1 shows the extension of the KUKA environment by adding a PC including Matlab or Scilab.
The KUKA controller is connected with the PC via serial interface. Subsequently, an interpreter was implemented in KRL to realise a bi-directional communication. The interpreter runs on the KUKA controller and is responsible for the identification and execution of commands that are transmitted by the PC. The control program is developed using Matlab or Scilab on the basis of the KUKA-KRL-Toolbox. Hence it runs on the PC.
.....